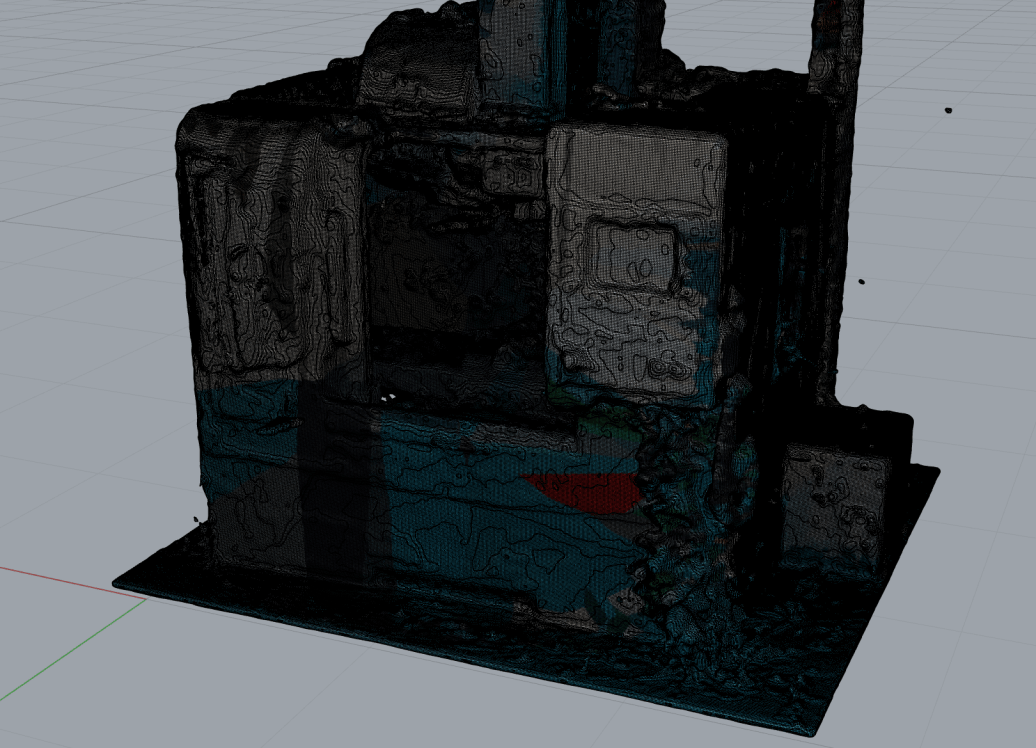
Nuage de point de la Somab
Récupération du nuage de point de l'atelier de l'IUT d'Orléans
Après avoir récupéré le gros nuage de point (3Go de données au format .e57), nous avons dû le réduire pour ne garder que la machine qui nous intéresse.
Le logiciel utilisé pour cette étape est la version d'essais de Autodesk Recap Pro car il permet de visualiser les différentes prises de vue du scanner et de couper le nuage de point proprement comme on le souhaite.